
Introducing the new, perhaps improved, L-catcher:

Why an L-catcher? Because I think it can be used to not only catch but also release hoops. Here’s an example course for how releasing (aka ‘delivering a hoop’) could work:

First we drive past the hoop receiving station:

Then we position ourselves in front of it:

Now we turn:
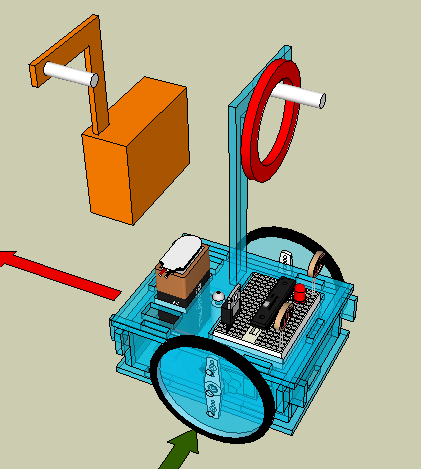
The red arrow on the driving surface between waypoints 2 and 3 means that we’re in reverse:

And ta-da:

Can Grisbot’s servos be timed with enough accuracy to perform this operation? Can a catch operation be combined with a release operation? Those are the challenges.
