
You know, time just flies when I’m doing graphic design. I sure wish I was good at it.
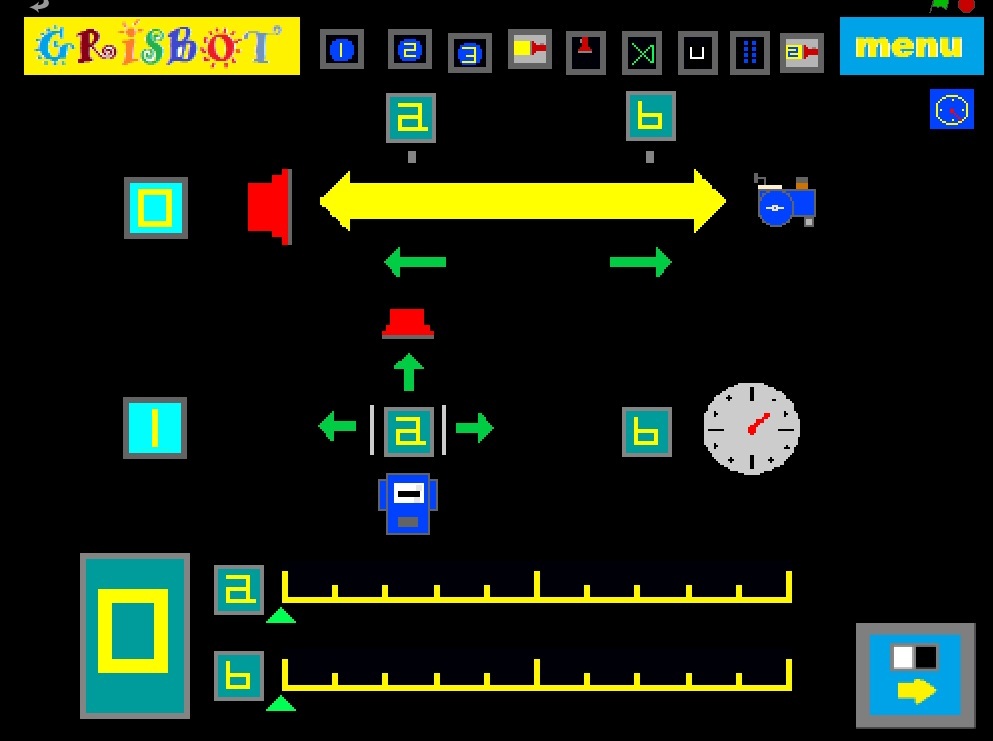
Anyhow, the above screen shows the graphical interface (in Scratch) for programming the robot in ‘light track’ mode.
0a: Specifies the distance at which the robot starts to move toward the light.
0b: Specifies the distance at which the robot starts to move away from the light.
1a: Specifies the angle at which the robot turns left or right or goes forward.
1b: Specifies a delay between sample rates.
It all makes sense to me because I’ve been working on it for days now. But I wonder how intuitive this screen is to someone who is seeing it for the first time. Not intuitive at all, I suppose. Well, my hope is that once it’s explained to the user, then it’s intuitive. We shall see.
