
Here is the graphical user interface for U-drive (not U-turn as I said yesterday).
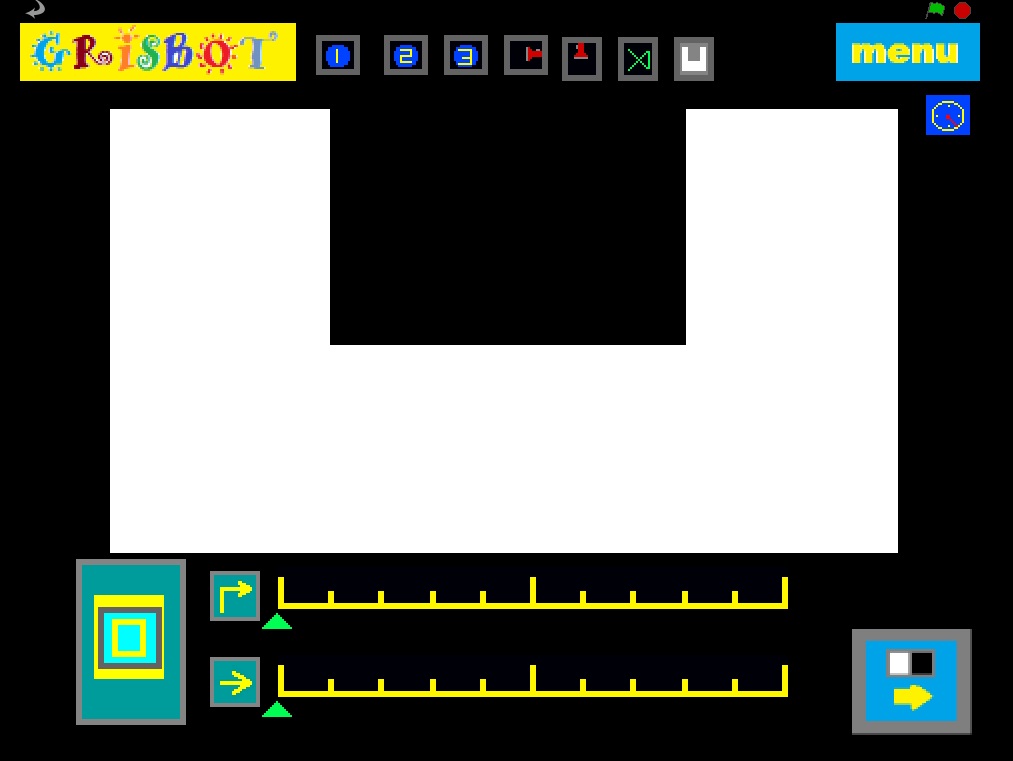
To put the robot in U-drive mode, click on the U icon, and then go directly to the communications page. Do not bother with the scales on the programming page because they don’t do anything in U-drive mode.
When the computer is done communicating with the robot, the lights will flash a countdown, and that gives the user time to click back to the programming page. There, the user can program the robot by moving it over the U on the screen, as was described yesterday.
It should be noted that when the robot completes its programmed run, it will flash a countdown again and then go back into ‘record program’ state. This makes it possible to do reiterations of U-drive without having to go back to the comm page each time. If you want to get out of U-drive mode, turn the robot off and on again.
The icon was pretty easy to make, as you can see.
![]()
I’m now up to seven action modes in all. I think one more should do it for Grisbot Version 1.0.
