
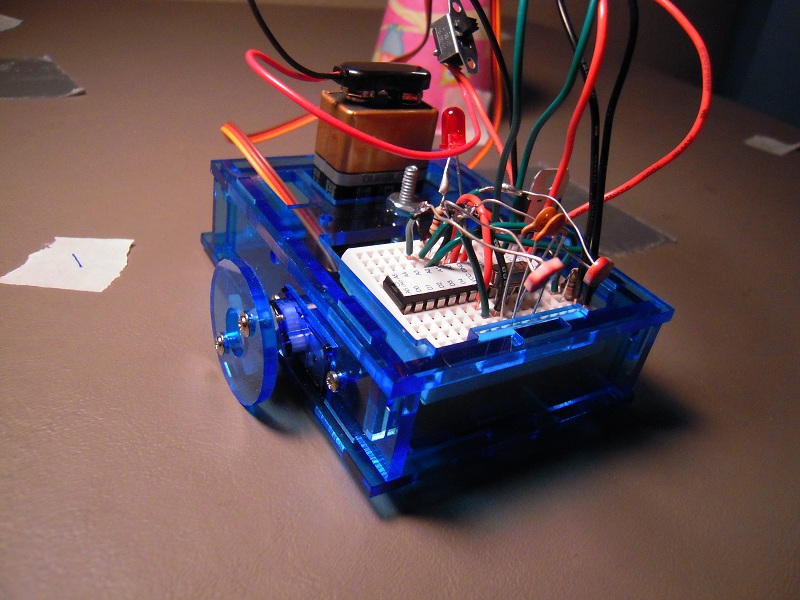
Metric Blue is now assembled sufficiently for operational testing. There was a bit of a tense moment when I discovered that I had connected the 9v battery lead to the voltage regulator’s 5v row, but miraculously nothing got fried. Though for a while the LED was remarkably bright!
The wheels are half the radius of the old design. I did that so that the robot would run slower. Slower is better in this case because it’s a table top robot and the old robot was so fast it would often race to the edge almost before I could rescue it.
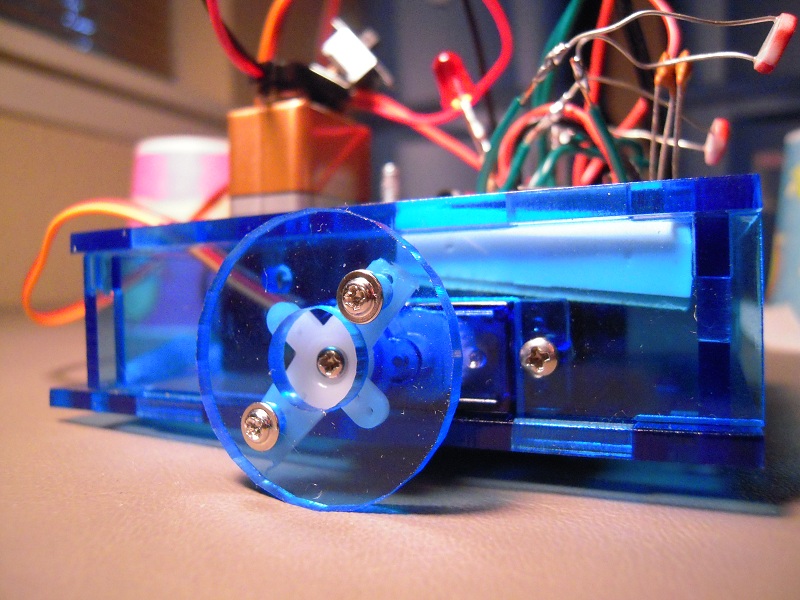
Also, the older, bigger wheels were wobbly. Metric Blue’s wheels are on tight. I miss the Toyota ‘tire’ gaskets that went on the old wheels, and for these new wheels have been thinking of putting electrical tape on the rims for added traction.
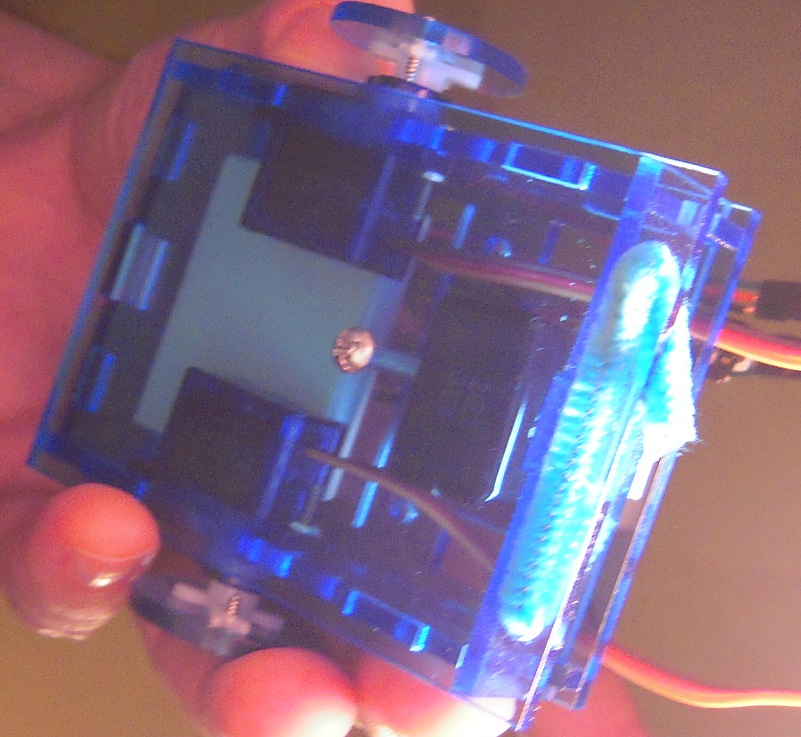
Notice the bottom’s rear edge has a ‘decorative’ pipe cleaner instead of a caster. A caster costs more than a dollar while the segment of pipe cleaner costs a few cents. Since Metric is small and built close to the ground, any old skid might have done, but a pipe cleaner cuts down on the friction.
I’ve tested the new robot on a table top obstacle course, and . . . I need a bigger table top. But it is definitely an improvement in navigational accuracy over the previous model.
