
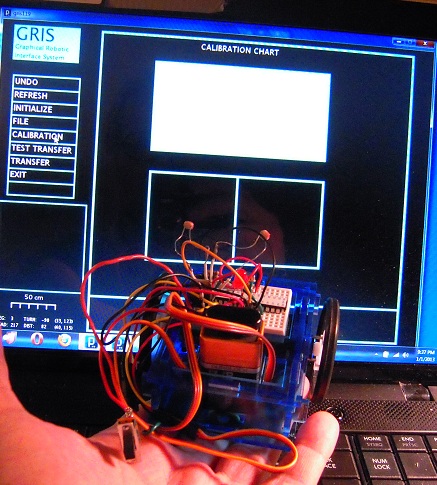
I have completed screen-to-photocell calibration and control code transfer. Mini grisbot passes both with flying (or at least hopping and skipping) colors. The remaining test phase is to calibrate the servo timings to execute the path as shown on the screen.
I just might finish this today.
