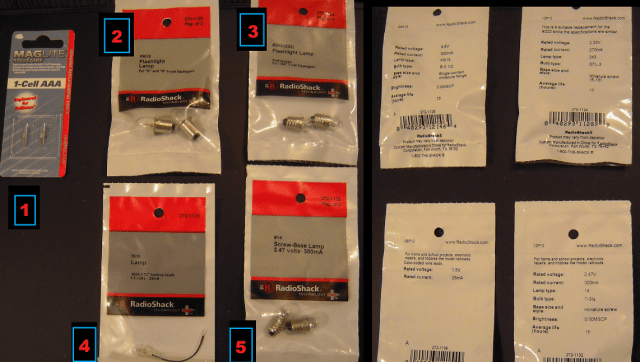
If Grisbot is to detect nearby objects by flashing a light on and off, it will need to carry its own lamp. So I went to Radio Shack and bought a few candidates. (NOTE: The packages shown on the right are simply the packages on the left after being flipped over in place.)
So which to use? I’ll have to experiment, but I thought it might be a good idea to run some calculations first.
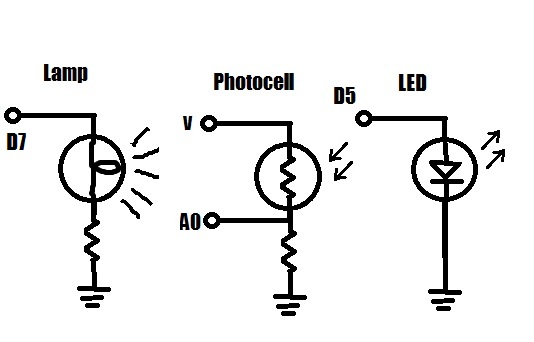
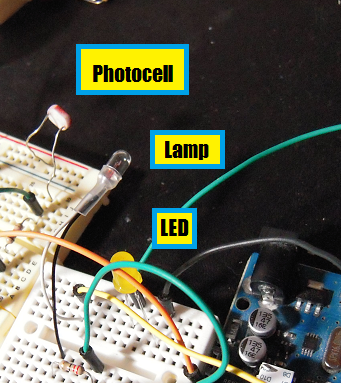
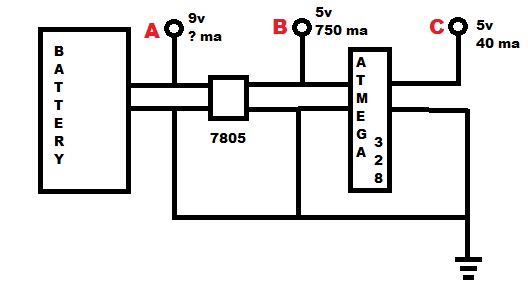
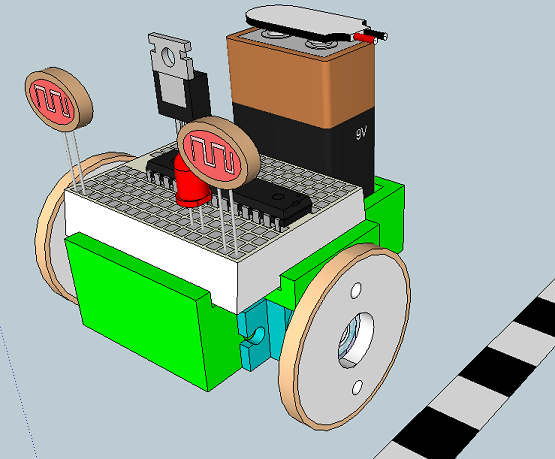
To do that, it’s necessary to consider the three points on the robot circuitry where the lamp can tap into voltage:
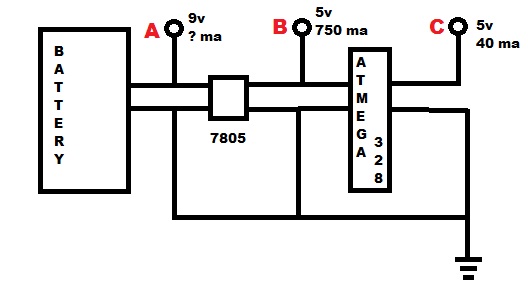
Point A is right off the battery. It’s a nine volt battery, but how much current does it provide? I couldn’t find out after a few minutes of searching (which included looking at a data sheet), so I thought, “Probably way more than enough.” So let’s leave it at that.
Point B is off the voltage regulator. The 7805 provides 5 volts and 750 milliamps according to an old reference book, which is what I put on the illustration but then I checked an online data sheet and it said 1.5 A. Progress!
Point C is from a pin on the ATMega328 microchip, and the Arduino site states that this is 5 volts and 40 ma max.
So what does this do for me?
Lamp Candidate #1 looks interesting, although at a voltage rating of 1.5 volts it will require a current-limiting resistor in series if I tap it off a 5-volt chip pin. I didn’t see anything on the packaging about the current, though.
The rated currents for Lamps #2 and #3 and #5 are so high (500 and 270 and 300 mA respectively) that they would probably be very dim if I run them off the chip (Tap C), although off the 7805 is probably okay. Then again, I have two microservos drawing current off the 7805 already. Anyhow, I’d need to add a transistor to control any lamp upstream from the chip. Hence I prefer providing voltage at Tap C, since I can directly turn the lamp on and off from the pin.
That brings us to #4. This looks suspiciously like #1 in different packaging. Here there is a current rating on the package — 25 ma — which I assume applies to lamp #1 too. The current-limiting series resistor would then be 3.5v/25ma = 140 ohms.
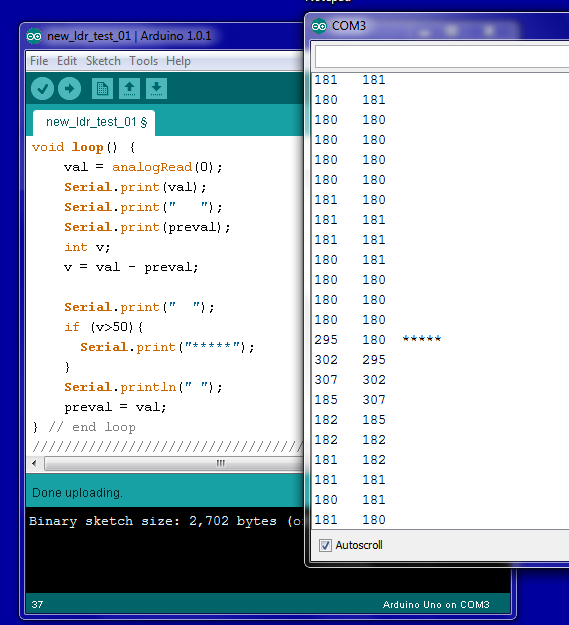
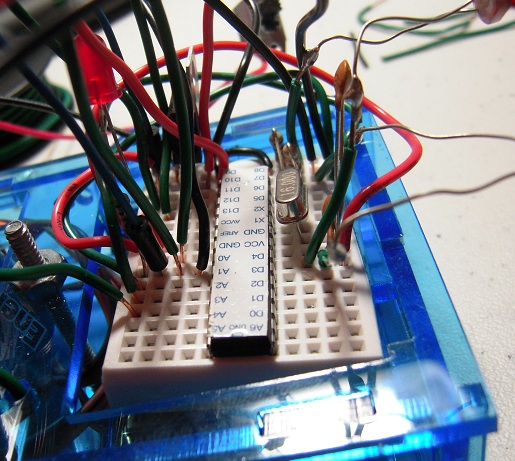
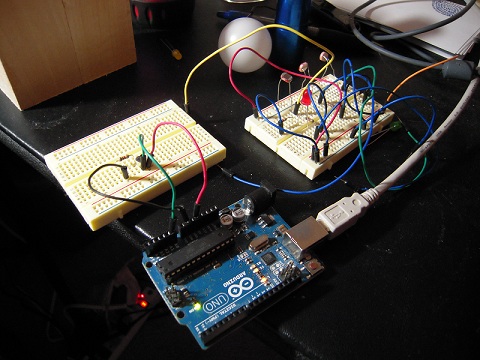
I’ll mount one of the maglite lamps on the robot breadboard and see if I can make it flicker without burning it out.