
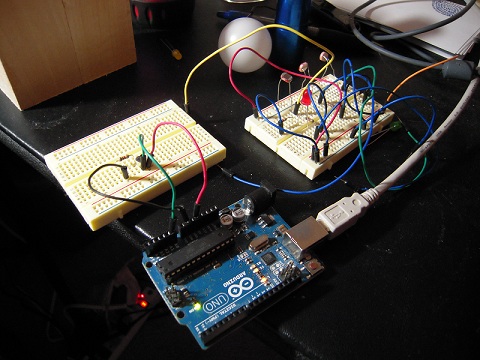
Tonight I tested out a couple ideas for where to go next with Grisbot.
On the right, I was working with the good old photocell testbed, which I connected to Arduino analog input A0 and measured the light reflected off a ping pong ball. It turns out that an LED light source barely registers, even if the LED is labeled ‘ultra bright.’ However, next to the ping pong ball in the photo is a small blue LED flashlight, which illuminates the ping pong ball enough to register a very significant and measurable change in intensity at the A0 input.
Okay, so you’re wondering, “Why is he measuring light reflected off a ping pong ball?” Well, my idea is to have the robot search for ping pong balls and herd them into a ‘corral.’ The robot would carry a light and when it approaches a ball, the light reflects off the ball and registers on the photocell inputs. Then commences the corralling procedure.
My second idea, involving the setup on the left, is based on something that Meredith of Big-Brained Superheroes suggested at the Seattle Robotics Society meeting on Saturday: using sound to control the robot.
I have a microphone module on order from Amazon, but it costs around $7 and that’s kind of pricey unless I offer it as an option. In the meantime, I idly wondered what would happen if I took the microphone and just used a paper cone rather than an op amp to magnify sound. It seems to make a difference, but I’ll have to experiment some more.
We’re not looking for speech recognition here, but rather just to get the robot to turn toward a noise or distinguish between one whistle and two.
At any rate, I still have about 75% of the ATMega328 chip memory open for additional programming, and every new feature helps toward being able to sell grisbot as a kit.
Huh, I wonder if I could use voice activation to guide Grissy into herding ping pong balls?
“That’ll do, bot.”
