

This is the Scratch-programmed user interface for the second mode for grisbot to obey commands from a flashlight shined from above.
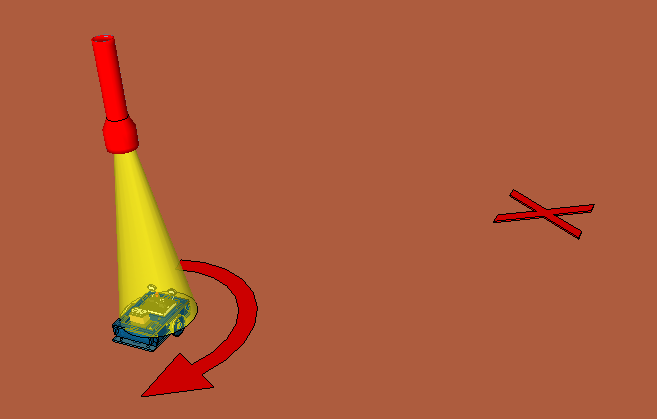
When a flashlight is shined on the robot with an intensity greater than user-selected value (a), the robot turns:
When the light intensity drops below (a)-100, the robot travels in a straight line and stops at user-selected distance (b):
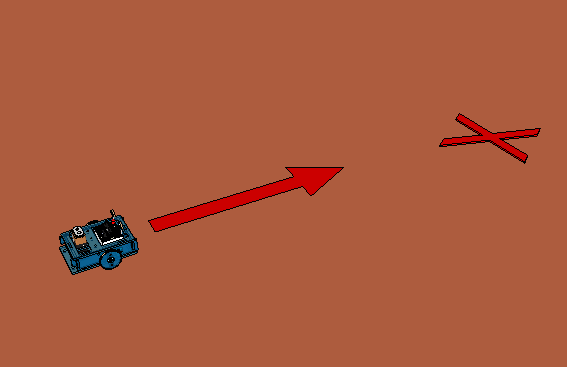
The user challenge is an exercise in geometry/trigonometry to move the robot toward a target position by a series of turns and moves:

I’ve programmed this procedure in both Scratch and Arduinoese (aka ‘Wiring’) so that it will work on the test bed, but the robot has chosen now to break down. I think that while moving the microcontroller onto the breadboard today, I jiggled the wires so that they are either loose or crossed. So trouble shooting the hardware is where I’m at today.
