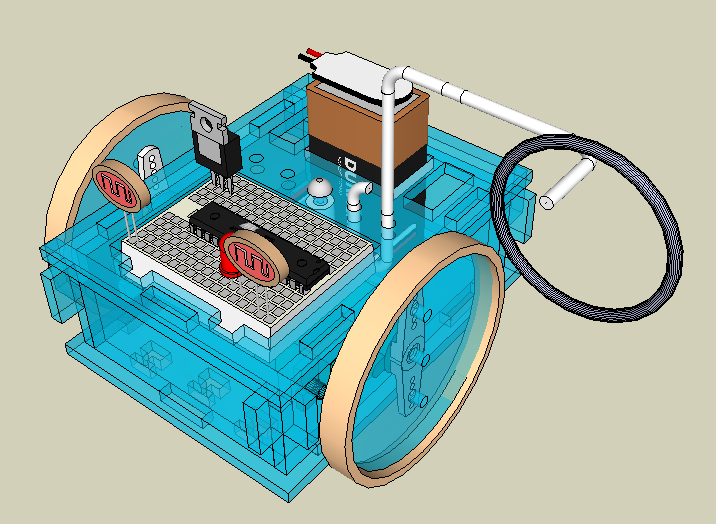
I plan to build the second prototype today, and here is what it should look like:
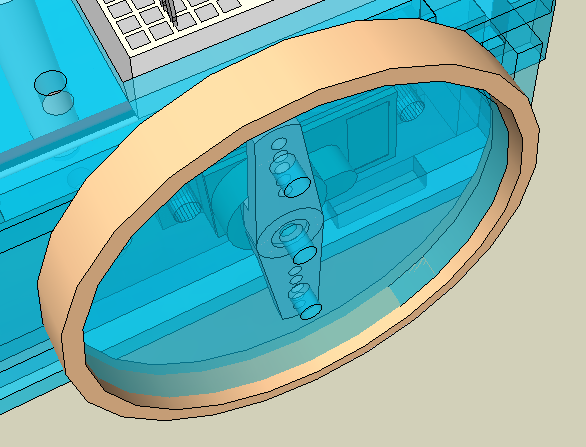
Wheels will use rubber bands instead of gaskets (saving $1 each wheel):
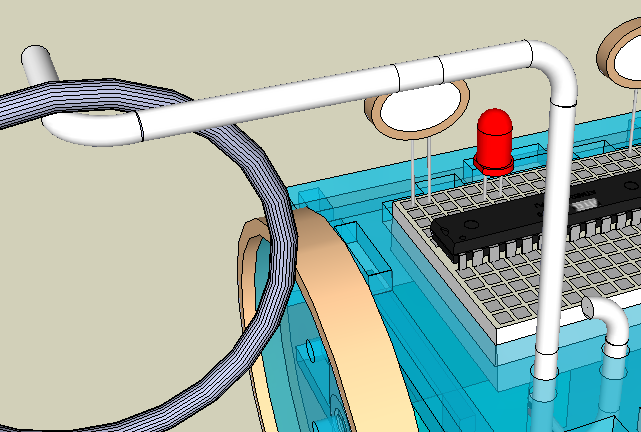
Holes in the lid will enable a wire ‘hoop catcher’ to be installed:
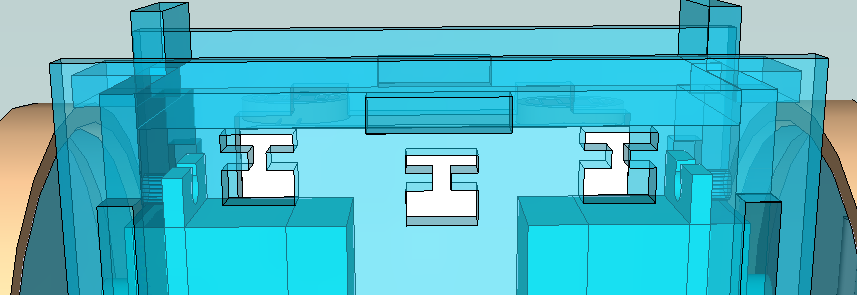
These notches in the lid allow for wires to be routed from the bread board to the interior of the robot:
These weird shaped holes in the front edge of the base will allow for placement of photocells and a light source, in case I want to add line-following capability: